sksurv.ensemble.GradientBoostingSurvivalAnalysis#
- class sksurv.ensemble.GradientBoostingSurvivalAnalysis(*, loss='coxph', learning_rate=0.1, n_estimators=100, subsample=1.0, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_depth=3, min_impurity_decrease=0.0, random_state=None, max_features=None, max_leaf_nodes=None, warm_start=False, validation_fraction=0.1, n_iter_no_change=None, tol=0.0001, dropout_rate=0.0, verbose=0, ccp_alpha=0.0)[source]#
Gradient-boosted Cox proportional hazard loss with regression trees as base learner.
In each stage, a regression tree is fit on the negative gradient of the loss function.
For more details on gradient boosting see [1] and [2]. If loss=’coxph’, the partial likelihood of the proportional hazards model is optimized as described in [3]. If loss=’ipcwls’, the accelerated failure time model with inverse-probability of censoring weighted least squares error is optimized as described in [4]. When using a non-zero dropout_rate, regularization is applied during training following [5].
See the User Guide for examples.
- Parameters:
loss ({'coxph', 'squared', 'ipcwls'}, optional, default: 'coxph') – loss function to be optimized. ‘coxph’ refers to partial likelihood loss of Cox’s proportional hazards model. The loss ‘squared’ minimizes a squared regression loss that ignores predictions beyond the time of censoring, and ‘ipcwls’ refers to inverse-probability of censoring weighted least squares error.
learning_rate (float, optional, default: 0.1) – learning rate shrinks the contribution of each tree by learning_rate. There is a trade-off between learning_rate and n_estimators. Values must be in the range [0.0, inf).
n_estimators (int, optional, default: 100) – The number of regression trees to create. Gradient boosting is fairly robust to over-fitting so a large number usually results in better performance. Values must be in the range [1, inf).
subsample (float, optional, default: 1.0) – The fraction of samples to be used for fitting the individual base learners. If smaller than 1.0 this results in Stochastic Gradient Boosting. subsample interacts with the parameter n_estimators. Choosing subsample < 1.0 leads to a reduction of variance and an increase in bias. Values must be in the range (0.0, 1.0].
min_samples_split (int or float, optional, default: 2) –
The minimum number of samples required to split an internal node:
If int, values must be in the range [2, inf).
If float, values must be in the range (0.0, 1.0] and min_samples_split will be ceil(min_samples_split * n_samples).
min_samples_leaf (int or float, optional, default: 1) –
The minimum number of samples required to be at a leaf node. A split point at any depth will only be considered if it leaves at least
min_samples_leaftraining samples in each of the left and right branches. This may have the effect of smoothing the model, especially in regression.If int, values must be in the range [1, inf).
If float, values must be in the range (0.0, 1.0) and min_samples_leaf will be ceil(min_samples_leaf * n_samples).
min_weight_fraction_leaf (float, optional, default: 0.) – The minimum weighted fraction of the sum total of weights (of all the input samples) required to be at a leaf node. Samples have equal weight when sample_weight is not provided. Values must be in the range [0.0, 0.5].
max_depth (int or None, optional, default: 3) – Maximum depth of the individual regression estimators. The maximum depth limits the number of nodes in the tree. Tune this parameter for best performance; the best value depends on the interaction of the input variables. If None, then nodes are expanded until all leaves are pure or until all leaves contain less than min_samples_split samples. If int, values must be in the range [1, inf).
min_impurity_decrease (float, optional, default: 0.) –
A node will be split if this split induces a decrease of the impurity greater than or equal to this value.
The weighted impurity decrease equation is the following:
N_t / N * (impurity - N_t_R / N_t * right_impurity - N_t_L / N_t * left_impurity)where
Nis the total number of samples,N_tis the number of samples at the current node,N_t_Lis the number of samples in the left child, andN_t_Ris the number of samples in the right child.N,N_t,N_t_RandN_t_Lall refer to the weighted sum, ifsample_weightis passed.random_state (int, RandomState instance, or None, optional, default: None) – Controls the random seed given to each Tree estimator at each boosting iteration. In addition, it controls the random permutation of the features at each split. It also controls the random splitting of the training data to obtain a validation set if n_iter_no_change is not None. Pass an int for reproducible output across multiple function calls.
max_features (int, float, {'sqrt', 'log2'} or None, optional, default: None) –
The number of features to consider when looking for the best split:
If int, values must be in the range [1, inf).
If float, values must be in the range (0.0, 1.0] and the features considered at each split will be max(1, int(max_features * n_features_in_)).
If ‘sqrt’, then max_features=sqrt(n_features).
If ‘log2’, then max_features=log2(n_features).
If None, then max_features=n_features.
Choosing max_features < n_features leads to a reduction of variance and an increase in bias.
Note: the search for a split does not stop until at least one valid partition of the node samples is found, even if it requires to effectively inspect more than
max_featuresfeatures.max_leaf_nodes (int or None, optional, default: None) – Grow trees with
max_leaf_nodesin best-first fashion. Best nodes are defined as relative reduction in impurity. Values must be in the range [2, inf). If None, then unlimited number of leaf nodes.warm_start (bool, optional, default: False) – When set to
True, reuse the solution of the previous call to fit and add more estimators to the ensemble, otherwise, just erase the previous solution.validation_fraction (float, optional, default: 0.1) – The proportion of training data to set aside as validation set for early stopping. Values must be in the range (0.0, 1.0). Only used if
n_iter_no_changeis set to an integer.n_iter_no_change (int, optional, default: None) –
n_iter_no_changeis used to decide if early stopping will be used to terminate training when validation score is not improving. By default it is set to None to disable early stopping. If set to a number, it will set asidevalidation_fractionsize of the training data as validation and terminate training when validation score is not improving in all of the previousn_iter_no_changenumbers of iterations. The split is stratified. Values must be in the range [1, inf).tol (float, optional, default: 1e-4) – Tolerance for the early stopping. When the loss is not improving by at least tol for
n_iter_no_changeiterations (if set to a number), the training stops. Values must be in the range [0.0, inf).dropout_rate (float, optional, default: 0.0) – If larger than zero, the residuals at each iteration are only computed from a random subset of base learners. The value corresponds to the percentage of base learners that are dropped. In each iteration, at least one base learner is dropped. This is an alternative regularization to shrinkage, i.e., setting learning_rate < 1.0. Values must be in the range [0.0, 1.0).
verbose (int, optional, default: 0) – Enable verbose output. If 1 then it prints progress and performance once in a while (the more trees the lower the frequency). If greater than 1 then it prints progress and performance for every tree. Values must be in the range [0, inf).
ccp_alpha (float, optional, default: 0.0) – Complexity parameter used for Minimal Cost-Complexity Pruning. The subtree with the largest cost complexity that is smaller than
ccp_alphawill be chosen. By default, no pruning is performed. Values must be in the range [0.0, inf).
- n_estimators_#
The number of estimators as selected by early stopping (if
n_iter_no_changeis specified). Otherwise it is set ton_estimators.- Type:
int
- feature_importances_#
The feature importances (the higher, the more important the feature).
- Type:
ndarray, shape = (n_features,)
- estimators_#
The collection of fitted sub-estimators.
- Type:
ndarray of DecisionTreeRegressor, shape = (n_estimators, 1)
- train_score_#
The i-th score
train_score_[i]is the loss of the model at iterationion the in-bag sample. Ifsubsample == 1this is the loss on the training data.- Type:
ndarray, shape = (n_estimators,)
- oob_improvement_#
The improvement in loss on the out-of-bag samples relative to the previous iteration.
oob_improvement_[0]is the improvement in loss of the first stage over theinitestimator. Only available ifsubsample < 1.0.- Type:
ndarray, shape = (n_estimators,)
- oob_scores_#
The full history of the loss values on the out-of-bag samples. Only available if
subsample < 1.0.- Type:
ndarray, shape = (n_estimators,)
- oob_score_#
The last value of the loss on the out-of-bag samples. It is the same as
oob_scores_[-1]. Only available ifsubsample < 1.0.- Type:
float
- n_features_in_#
Number of features seen during
fit.- Type:
int
- feature_names_in_#
Names of features seen during
fit. Defined only when X has feature names that are all strings.- Type:
ndarray, shape = (n_features_in_,)
- max_features_#
The inferred value of max_features.
- Type:
int
- unique_times_#
Unique time points.
- Type:
ndarray, shape = (n_unique_times,)
See also
sksurv.ensemble.ComponentwiseGradientBoostingSurvivalAnalysisGradient boosting with component-wise least squares as base learner.
References
- __init__(*, loss='coxph', learning_rate=0.1, n_estimators=100, subsample=1.0, min_samples_split=2, min_samples_leaf=1, min_weight_fraction_leaf=0.0, max_depth=3, min_impurity_decrease=0.0, random_state=None, max_features=None, max_leaf_nodes=None, warm_start=False, validation_fraction=0.1, n_iter_no_change=None, tol=0.0001, dropout_rate=0.0, verbose=0, ccp_alpha=0.0)[source]#
Methods
__init__(*[, loss, learning_rate, ...])apply(X)Apply trees in the ensemble to X, return leaf indices.
fit(X, y[, sample_weight, monitor])Fit the gradient boosting model.
Get metadata routing of this object.
get_params([deep])Get parameters for this estimator.
predict(X)Predict risk scores.
predict_cumulative_hazard_function(X[, ...])Predict cumulative hazard function.
predict_survival_function(X[, return_array])Predict survival function.
score(X, y)Returns the concordance index of the prediction.
set_fit_request(*[, monitor, sample_weight])Configure whether metadata should be requested to be passed to the
fitmethod.set_params(**params)Set the parameters of this estimator.
Predict risk scores at each stage for X.
Attributes
- apply(X)#
Apply trees in the ensemble to X, return leaf indices.
Added in version 0.17.
- Parameters:
X ({array-like, sparse matrix} of shape (n_samples, n_features)) – The input samples. Internally, its dtype will be converted to
dtype=np.float32. If a sparse matrix is provided, it will be converted to a sparsecsr_array.- Returns:
X_leaves – For each datapoint x in X and for each tree in the ensemble, return the index of the leaf x ends up in each estimator. In the case of binary classification n_classes is 1.
- Return type:
array-like of shape (n_samples, n_estimators, n_classes)
- fit(X, y, sample_weight=None, monitor=None)[source]#
Fit the gradient boosting model.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – Data matrix
y (structured array, shape = (n_samples,)) – A structured array with two fields. The first field is a boolean where
Trueindicates an event andFalseindicates right-censoring. The second field is a float with the time of event or time of censoring.sample_weight (array-like, shape = (n_samples,), optional) – Weights given to each sample. If omitted, all samples have weight 1.
monitor (callable, optional) – The monitor is called after each iteration with the current iteration, a reference to the estimator and the local variables of
_fit_stagesas keyword argumentscallable(i, self, locals()). If the callable returnsTruethe fitting procedure is stopped. The monitor can be used for various things such as computing held-out estimates, early stopping, model introspect, and snapshoting.
- Returns:
self – Returns self.
- Return type:
object
- get_metadata_routing()#
Get metadata routing of this object.
Please check User Guide on how the routing mechanism works.
- Returns:
routing – A
MetadataRequestencapsulating routing information.- Return type:
MetadataRequest
- get_params(deep=True)#
Get parameters for this estimator.
- Parameters:
deep (bool, default=True) – If True, will return the parameters for this estimator and contained subobjects that are estimators.
- Returns:
params – Parameter names mapped to their values.
- Return type:
dict
- predict(X)[source]#
Predict risk scores.
If loss=’coxph’, predictions can be interpreted as log hazard ratio similar to the linear predictor of a Cox proportional hazards model. If loss=’squared’ or loss=’ipcwls’, predictions are the time to event.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – The input samples.
- Returns:
y – The risk scores.
- Return type:
ndarray, shape = (n_samples,)
- predict_cumulative_hazard_function(X, return_array=False)[source]#
Predict cumulative hazard function.
Only available if
fit()has been called with loss = “coxph”.The cumulative hazard function for an individual with feature vector \(x\) is defined as
\[H(t \mid x) = \exp(f(x)) H_0(t) ,\]where \(f(\cdot)\) is the additive ensemble of base learners, and \(H_0(t)\) is the baseline hazard function, estimated by Breslow’s estimator.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – Data matrix.
return_array (bool, default: False) –
Whether to return a single array of cumulative hazard values or a list of step functions.
If False, a list of
sksurv.functions.StepFunctionobjects is returned.If True, a 2d-array of shape (n_samples, n_unique_times) is returned, where n_unique_times is the number of unique event times in the training data. Each row represents the cumulative hazard function of an individual evaluated at unique_times_.
- Returns:
cum_hazard – If return_array is False, an array of n_samples
sksurv.functions.StepFunctioninstances is returned.If return_array is True, a numeric array of shape (n_samples, n_unique_times_) is returned.
- Return type:
ndarray
Examples
>>> import matplotlib.pyplot as plt >>> from sksurv.datasets import load_veterans_lung_cancer >>> from sksurv.preprocessing import OneHotEncoder >>> from sksurv.ensemble import GradientBoostingSurvivalAnalysis
Load the data and encode categorical features.
>>> X, y = load_veterans_lung_cancer() >>> Xt = OneHotEncoder().fit_transform(X)
Fit the model.
>>> estimator = GradientBoostingSurvivalAnalysis().fit(Xt, y)
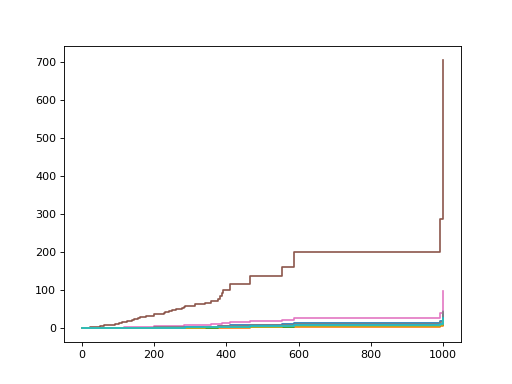
Estimate the cumulative hazard function for the first 10 samples.
>>> chf_funcs = estimator.predict_cumulative_hazard_function(Xt.iloc[:10])
Plot the estimated cumulative hazard functions.
>>> for fn in chf_funcs: ... plt.step(fn.x, fn(fn.x), where="post") ... [...] >>> plt.show()
- predict_survival_function(X, return_array=False)[source]#
Predict survival function.
Only available if
fit()has been called with loss = “coxph”.The survival function for an individual with feature vector \(x\) is defined as
\[S(t \mid x) = S_0(t)^{\exp(f(x)} ,\]where \(f(\cdot)\) is the additive ensemble of base learners, and \(S_0(t)\) is the baseline survival function, estimated by Breslow’s estimator.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – Data matrix.
return_array (bool, default: False) –
Whether to return a single array of survival probabilities or a list of step functions.
If False, a list of
sksurv.functions.StepFunctionobjects is returned.If True, a 2d-array of shape (n_samples, n_unique_times) is returned, where n_unique_times is the number of unique event times in the training data. Each row represents the survival function of an individual evaluated at unique_times_.
- Returns:
survival – If return_array is False, an array of n_samples
sksurv.functions.StepFunctioninstances is returned.If return_array is True, a numeric array of shape (n_samples, n_unique_times_) is returned.
- Return type:
ndarray
Examples
>>> import matplotlib.pyplot as plt >>> from sksurv.datasets import load_veterans_lung_cancer >>> from sksurv.preprocessing import OneHotEncoder >>> from sksurv.ensemble import GradientBoostingSurvivalAnalysis
Load the data and encode categorical features.
>>> X, y = load_veterans_lung_cancer() >>> Xt = OneHotEncoder().fit_transform(X)
Fit the model.
>>> estimator = GradientBoostingSurvivalAnalysis().fit(Xt, y)
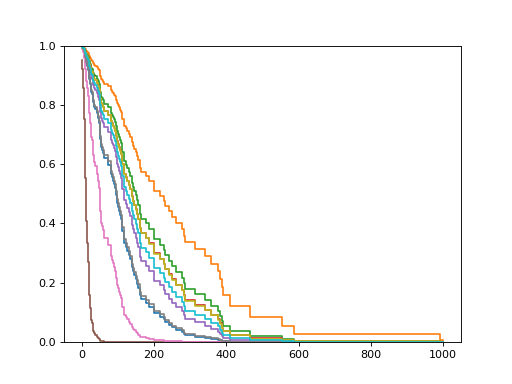
Estimate the survival function for the first 10 samples.
>>> surv_funcs = estimator.predict_survival_function(Xt.iloc[:10])
Plot the estimated survival functions.
>>> for fn in surv_funcs: ... plt.step(fn.x, fn(fn.x), where="post") ... [...] >>> plt.ylim(0, 1) (0.0, 1.0) >>> plt.show()
- score(X, y)[source]#
Returns the concordance index of the prediction.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – Test samples.
y (structured array, shape = (n_samples,)) – A structured array containing the binary event indicator as first field, and time of event or time of censoring as second field.
- Returns:
cindex – Estimated concordance index.
- Return type:
float
See also
sksurv.metrics.concordance_index_censoredComputes the concordance index.
- set_fit_request(*, monitor: bool | None | str = '$UNCHANGED$', sample_weight: bool | None | str = '$UNCHANGED$') GradientBoostingSurvivalAnalysis#
Configure whether metadata should be requested to be passed to the
fitmethod.Note that this method is only relevant when this estimator is used as a sub-estimator within a meta-estimator and metadata routing is enabled with
enable_metadata_routing=True(seesklearn.set_config()). Please check the User Guide on how the routing mechanism works.The options for each parameter are:
True: metadata is requested, and passed tofitif provided. The request is ignored if metadata is not provided.False: metadata is not requested and the meta-estimator will not pass it tofit.None: metadata is not requested, and the meta-estimator will raise an error if the user provides it.str: metadata should be passed to the meta-estimator with this given alias instead of the original name.
The default (
sklearn.utils.metadata_routing.UNCHANGED) retains the existing request. This allows you to change the request for some parameters and not others.Added in version 1.3.
- Parameters:
monitor (str, True, False, or None, default=sklearn.utils.metadata_routing.UNCHANGED) – Metadata routing for
monitorparameter infit.sample_weight (str, True, False, or None, default=sklearn.utils.metadata_routing.UNCHANGED) – Metadata routing for
sample_weightparameter infit.
- Returns:
self – The updated object.
- Return type:
object
- set_params(**params)#
Set the parameters of this estimator.
The method works on simple estimators as well as on nested objects (such as
Pipeline). The latter have parameters of the form<component>__<parameter>so that it’s possible to update each component of a nested object.- Parameters:
**params (dict) – Estimator parameters.
- Returns:
self – Estimator instance.
- Return type:
estimator instance
- staged_predict(X)[source]#
Predict risk scores at each stage for X.
This method allows monitoring (i.e. determine error on testing set) after each stage.
If loss=’coxph’, predictions can be interpreted as log hazard ratio similar to the linear predictor of a Cox proportional hazards model. If loss=’squared’ or loss=’ipcwls’, predictions are the time to event.
- Parameters:
X (array-like, shape = (n_samples, n_features)) – The input samples.
- Returns:
y – The predicted value of the input samples.
- Return type:
generator of array of shape = (n_samples,)